


employee from 01.01.2025 until now
St. Petersburg, Russian Federation
employee from 01.01.2025 until now
Saint Petersburg, St. Petersburg, Russian Federation
employee from 01.01.2025 until now
St. Petersburg, Russian Federation
UDC 004.942
Drillstring sticking incidents represent a critical source of non-productive time (NPT) and economic losses in drilling operations. This study presents a refined, verifiable, and interpretable framework for stuck pipe risk assessment and prediction employing a hybrid methodology: benchmarking of real-time downhole measurements against computed Torque & Drag and hydraulics models, normalized deviation (DEV) and rate-of-change (ROC) metrics, coupled with a secondary anomaly detection layer utilizing LSTM autoencoder architecture. The paper focuses on methodological validation, mathematical formulation, threshold calibration procedures, and field data case studies. This research bridges the gap between conventional T&D engineering practices and contemporary machine learning techniques while preserving the interpretability required by drilling personnel for operational decision-making.
stuck pipe incidents, Torque & Drag modeling, predictive analytics, LSTM autoencoder, WITSML telemetry, deviation metrics, rate-of-change analysis, risk index
1. Введение
Прихват бурильной колонны (stuck pipe) — мультифакторная проблема, приводящая к значительным потерям времени и средств. Несмотря на развитие симуляторов Torque & Drag (T&D) и систем мониторинга, своевременная автоматическая идентификация предвестников прихвата остается актуальной задачей. Традиционные инженерные методы дают интерпретируемые прогнозы, но чувствительны к ошибкам во входных моделях; чисто статистические и ML-подходы демонстрируют высокую чувствительность на больших наборах данных, но их интерпретируемость и переносимость между площадками ограничена. В предлагаемом гибридном подходе мы объединяем сильные стороны обоих направлений: физически обоснованные прогнозы T&D и гидравлики, нормализованные индикаторы DEV/ROC с адаптивными порогами и LSTM-автоэнкодер второго уровня для выявления нетипичных паттернов, не захваченных первым уровнем [1].
2. Краткий обзор литературы
Современные исследования по прогнозированию прихватов можно условно разделить на три класса: физические модели T&D и гидравлики, статистические/многомерные методы и методы машинного обучения (включая глубокие сети для временных рядов). Недавние обзоры и практические кейсы демонстрируют эффективность гибридных схем, сочетающих физические расчеты и алгоритмы обнаружения аномалий [2]. Параллельно развивается практика стандартизованного обмена данными (WITSML), что позволяет интегрировать расчетные кривые и инженерные модели в систему реального времени и предиктивной аналитики.
3. Данные и требования к сбору
3.1. Необходимые данные
Параметры:
-
крутящий момент (Torque);
-
вес на крюке (Hook Load);
-
давление в нагнетательной линии (Pump Pressure);
-
обороты ротора (RPM);
-
расход бурового раствора (Flow Rate);
-
положение долота (Bit Depth).
Частота:
-
минимум 1 точка в 10 секунд (0,1 Гц);
-
оптимально 1 точка в 1 секунду (1 Гц) для повышения точности.
Объем данных:
-
хранение данных за последние 300 секунд для расчетов в реальном времени;
-
долгосрочные данные сохраняются в базе данных для анализа трендов и обучения модели.
Источник данных:
-
G-BOX/WITSML-сервер: данные в реальном времени c буровых датчиков [3].
Датчики на буровой:
-
наземные датчики (давление, скорость вращения, расход);
-
датчик нагрузки (вес на крюке и нагрузка на долото);
-
исторические данные: из предыдущих скважин для калибровки и обучения алгоритмов.
3.2. Источник прогнозных значений
В схеме все прогнозные кривые (модельные значения) не генерируются внутри кода, а готовятся заранее в инженерном ПО и импортируются в систему до запуска алгоритма.
Таблица 1. Перечень необходимых данных и их источники
|
Перечень прогнозных (расчетных) параметров |
|
|
Параметр |
Описание |
|
Расчетное значение Hook Load (T&D) |
|
|
|
Расчетный Torque (T&D) |
|
Расчетное давление (гидравлика) |
|
|
(опционально) |
Расчетное ECD (при наличии MWD) |
4. Процесс подготовки и импорта
4.1. Моделирование в инженерном ПО
- Torque & Drag (модуль расчета нагрузок T&D в Schlumberger DOX, Landmark WellPlan, Baker Hughes Advantage engineering и т. п.) — экспорт значений
- Гидравлика (Hydraulics module) — экспорт
- (При наличии) расчет ECD через MWD/PWD Sensor — экспорт значений
4.2. Экспорт
-
Формат CSV/Excel с колонками.
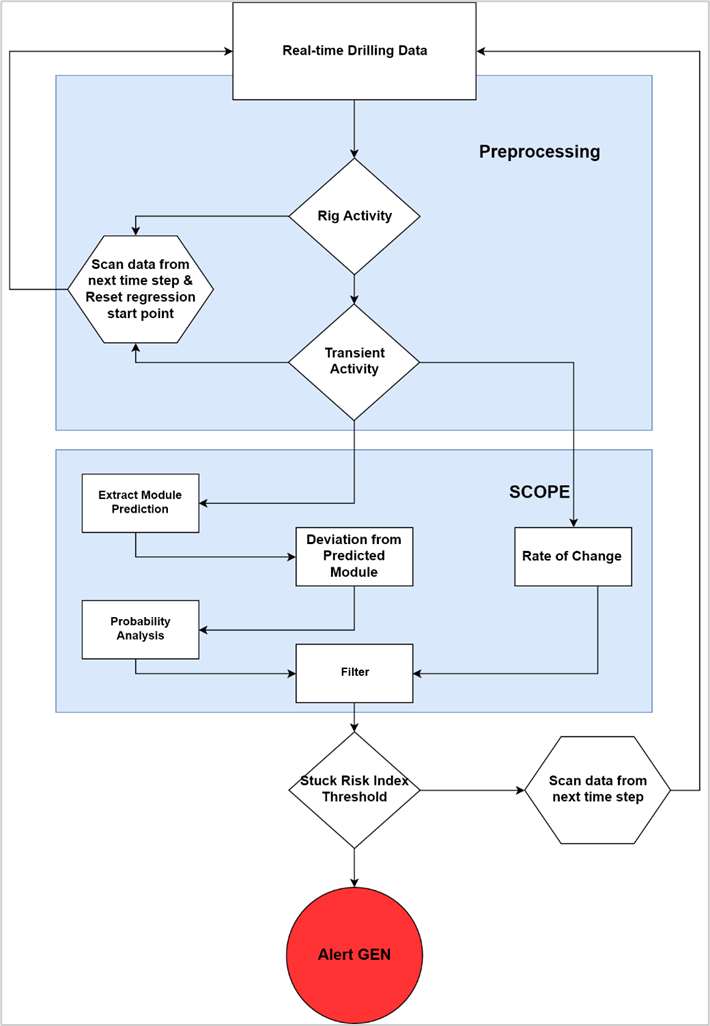
Рисунок 1. Структура входных данных
5. Математическая модель и методика оценки рисков
5.1. Отклонения от модели
Реальные данные, полученные с датчиков в реальном времени, сравниваются с рассчитанными моделями гидравлики и крутящего момента (Torque & Drag).
Алгоритм анализа отклонений
-
Для каждого параметра (например, крутящий момент или давление) рассчитывается разница между реальными и прогнозируемыми значениями.
-
Отклонение выражается в процентах:
- Каждое отклонение анализируется на предмет превышения допустимого порога, который определяется для каждого параметра и типа операции.
Пример
Если давление отклоняется более, чем на 10 % от прогнозируемого значения, это может указывать на зашламованность.
Алгоритм расчета:
-
Для каждого параметра вычисляется скорость изменения (Rate of Change, ROC):
-
Рассчитывается скользящее среднее значения ROC за заданный временной интервал (например, 300 секунд).
-
Если ROC превышает заданный порог, формируется предупреждение.
Rate of Change (ROC) обнаруживает потенциальные проблемы, фиксируя резкие изменения ключевых параметров без необходимости сравнения с ожидаемыми значениям. Преимущество метода в том, что он решает проблему, когда отклонение от модели слишком мало для срабатывания аларма из-за усреднения или сглаживания данных, и позволяет выявлять ухудшающиеся условия в скважине, даже если отклонения от модели кажутся незначительными. Используется для быстрого выявления резких изменений, которые могут быть пропущены при анализе «план/факт», при этом направление изменения (положительное или отрицательное) зависит от типа активности на буровой и отслеживаемого параметра.
Пример
Быстрый рост крутящего момента при бурении может указывать на рост коэффициентов трения и риск прихвата.
Нормализация и присвоение уровня оповещения (Alert Level)
В отсутствие датчиков для измерения эквивалентной циркуляционной плотности (ECD) в реальном времени используются следующие параметры для расчета (Stuck Risk):
-
отклонение крутящего момента от модели,
-
отклонение веса на крюке от модели,
-
отклонение давления от модели,
-
скорость изменения крутящего момента,
-
скорость изменения веса на крюке,
-
скорость изменения давления.
5.2. Принципы формирования
Для каждого контролируемого параметра определяется уровень риска (Alert Level) исходя из степени отклонения или динамики изменения. Уровни могут принимать несколько градаций:
-
0 — параметр в пределах нормы;
-
1 — незначительное отклонение от базового значения;
-
2–3 — выраженное отклонение, требующее внимания и корректирующих действий.
Расчет интегрального риска прихвата
Индивидуальные оценки параметров агрегируются в интегральный показатель риска. Значения шкалы выражаются в относительных процентах: чем выше итоговое значение, тем выше вероятность осложнений. В практическом применении пороговые значения для интерпретации задаются оператором в зависимости от условий конкретного месторождения [4].
Интерпретация
-
Риск < 35 %: нормальные условия.
-
Риск 35–50 %: неоптимальные условия, требующие внимания.
-
Риск > 50 %: высокая вероятность осложнений, необходимы немедленные действия.
Таблица 2. Матрица порогов (Threshold Matrix) для различных операций
|
Threshold Matrix |
||||||
|
Activity |
P1 Deviation |
P2 Deviation |
P3 Deviation |
P1 Rate |
P2 Rate |
P3 Rate |
|
Rotary Drill |
Set by ML/AI or operator |
Set by ML/AI or operator |
Set by ML/AI or operator |
Set by ML/AI or operator |
Set by ML/AI or operator |
Set by ML/AI or operator |
|
Slide Drill |
Set by ML/AI or operator |
— |
Set by ML/AI or operator |
Set by ML/AI or operator |
— |
Set by ML/AI or operator |
|
X |
|
|
|
|
|
|
5.3. Адаптация математической модели
Для каждого контролируемого параметра задается пороговое значение. Пока данные находятся в пределах нормы, режим считается стабильным. При выходе за пределы порога параметр классифицируется как требующий повышенного внимания.
Для оценки риска прихвата применяется мониторинг динамики ключевых параметров в режиме реального времени. Важно, чтобы обработка данных выполнялась своевременно, что позволяет оперативно принимать меры при росте вероятности осложнений.
Система получает поток данных от буровой установки (например, через стандартные протоколы обмена) и автоматически определяет тип выполняемой операции. Это обеспечивает корректное сопоставление фактических данных с расчетными моделями гидравлики и нагрузок.
Далее для каждой точки вычисляются нормализованные показатели отклонения и скорости изменения, которые интегрируются в общую схему оценки риска.
Сперва производится вычисление DEV относительно модели. Для каждой точки в выбранном интервале определяется, на сколько процентов фактические данные отличаются от расчетного значения. Инженерные расчеты T&D и гидравлики формируются на этапе планирования скважины, однако в процессе строительства фактические данные поступают с гораздо большей частотой, и многие замеры оказываются «между» расчетными точками. Для корректного сопоставления применяется интерполяция расчетных данных на заданный интервал, что позволяет получить прогнозные значения именно в тех точках, где фиксируются фактические измерения. Это решение обеспечивает более точное сравнение фактических и расчетных параметров [5].
Так как шаг между расчетными точками обычно невелик, достаточно линейной интерполяции, которая не вносит значимых ошибок и позволяет корректно определить прогнозное значение параметра для любой глубины на основе ближайших расчетных данных:
Процентное отклонение рассчитывается как относительная разница между фактическим и прогнозным значением. Такой расчет выполняется для каждой точки в выбранном интервале, после чего результаты усредняются. Итоговое значение сопоставляется с допустимым диапазоном отклонений. Если оно находится в пределах нормы, система не формирует оповещения:
Применение фиксированного порога имеет два ограничения:
-
высокая чувствительность к самому значению порога — даже небольшое изменение приводит к другому результату (сработало / не сработало);
-
отсутствие градации между незначительными и сильными отклонениями — все превышения учитываются одинаково, хотя степень риска различна.
Для устранения этих недостатков предлагается подход, в котором учитывается не только сам факт превышения порога, но и его величина, что позволяет более реалистично оценивать уровень риска.
Таблица 3. Матрица ранжирования уровней оповещения
|
Normalized Deviation |
||
|
Calculated Deviation vs. Reference |
Interpretation |
Alert Level |
|
Within acceptable range |
Stable |
0 |
|
Moderate deviation |
Attention required |
1–2 |
|
Significant deviation |
High risk |
3 |
|
Normalized Rate |
||
|
Calculated Trend vs. Reference |
Interpretation |
Alert Level |
|
Within acceptable rate |
Stable |
0 |
|
Moderate change |
Attention required |
1–2 |
|
Significant change |
High risk |
3 |
В качестве примера можно рассмотреть ситуацию, когда фактическое отклонение значительно превышает допустимое. Для вычисления уровня оповещения используется отношение величины отклонения к установленному порогу. При этом значения искусственно ограничиваются сверху фиксированным максимумом, чтобы исключить чрезмерное влияние единичных аномальных данных.
После расчета индикатора для одного параметра аналогичный алгоритм применяется и к другим ключевым параметрам (нагрузка на крюк, давление циркуляции и др.). Итоговый суммарный показатель формируется как агрегированная оценка по всем параметрам [7].
Анализ скорости изменения (Rate) реализуется через сравнение скользящих средних в соседних интервалах данных. Такой подход позволяет выявлять не только факт отклонения, но и его динамику, что повышает чувствительность системы к ранним признакам осложнений:
Тот же принцип вычисления Alert применяется и для показателя скорости изменения (Rate), хотя пороговые значения для него задаются отдельно.
При объединении компонентов Normalized Deviation и Normalized Rate формируется совокупная шкала, до 100 процентов. Заключительный шаг методики заключается в сопоставлении фактического уровня отклонения с максимально возможным, что позволяет получить итоговую оценку риска прихвата (Stuck Risk) [8]:
Таблица 4. Таблица выбора окна данных для различных типов операций
|
Table of Data Window Selection for Main Types of Activities
|
||
|
Rig Activity |
Normalized Deviation |
Normalized Rate |
|
Slide Drill |
[Deviation_Window 2] |
[MVG AVG_Window 2] - [MVG AVG_Window 1] / [MVG AVG_Window 1] |
|
Rotary Drill |
[Deviation_Window 2] |
[MVG AVG_Window 2] - [MVG AVG_Window 1] / [MVG AVG_Window 1] |
|
Ream In |
[Deviation_Window 2] |
[MVG AVG_Window 2] - [MVG AVG_Window 1] / [MVG AVG_Window 1] |
|
Back Ream |
[Deviation_Window 3] |
[MVG AVG_Window 4] - [MVG AVG_Window 3] / [MVG AVG_Window 3] |
|
Trip In |
[Deviation_Window 2] |
[MVG AVG_Window 2] - [MVG AVG_Window 1] / [MVG AVG_Window 1] |
|
Trip Out |
[Deviation_Window 3] |
[MVG AVG_Window 4] - [MVG AVG_Window 3] / [MVG AVG_Window 3] |
Таблица 5. Размеры и структура окон
|
Structure and Size of Windows |
||||
|
Normalized Deviation |
Множитель n |
Радиус R = n точек |
Длина 2R + 1, точек |
В секундах (при 1 Гц) |
|
Deviation_Window_1 |
x1 |
|
11 |
11 с |
|
Deviation_Window_2 |
x2 |
|
21 |
21 с |
|
Deviation_Window_3 |
x3 |
|
31 |
31 с |
|
Deviation_Window_4 |
x4 |
|
41 |
41 с |
Примечание: здесь
Далее описаны основные изменения.
5.4. Непрерывное обновление прогнозных значений
Платформа RigSpace Monitoring будет получать актуальные данные от Landmark WELLPLAN [9], включая расчетные значения гидравлики, T&D и ECD, а также дополнительные данные от MWD [6].
-
Это важно, так как устраняет необходимость заранее строить модели гидравлики и T&D для каждой операции. Вместо этого прогноз параметров будет создаваться непрерывно на основе данных в реальном времени.
-
Также это было критическим изменением, так как больше не требовалось строить гидравлические и T&D модели для каждой операции перед началом бурения. Вместо этого для каждого параметра создается непрерывный прогноз, основанный на времени.
Использование этого метода позволяет работать не только с данными, привязанными к глубине, но и с данными, привязанными ко времени, теперь расчет Rate и пороговых значений выполняется не только по глубине, но и по времени:
где Bit Velocity — скорость подачи бурового инструмента.
Эта формула позволяет учитывать изменения глубины за определенный промежуток времени и применять адаптированные пороговые значения в реальном времени.
Добавление параметра ROP к процентному изменению параметра во времени позволило использовать те же пороговые значения, которые ранее были экспериментально подтверждены для расчетов на основе глубины. Это дало возможность эффективно переводить пороговые значения из глубинного домена во временной.
Для повышения точности расчетов ROC дополнительно предлагается учитывать изменения RPM (скорости вращения) или Flowrate (скорости потока). Было замечено, что увеличение скорости потока с 32 до 40 л/с приводило к резкому увеличению Rate (SPP), что могло быть ошибочно интерпретировано системой как рост риска прихвата.
Таким образом, если входной параметр увеличивается (например, с 32 л/с до 40 л/с), коэффициент временно становится больше 1. Это увеличивает порог ROC на определенное время, чтобы расчет риска прихвата не реагировал на изменения входных параметров.
Отклонение от прогнозной модели
Для каждой точки
,
.
Итоговый риск прихвата (Pipe-Sticking Risk):
.
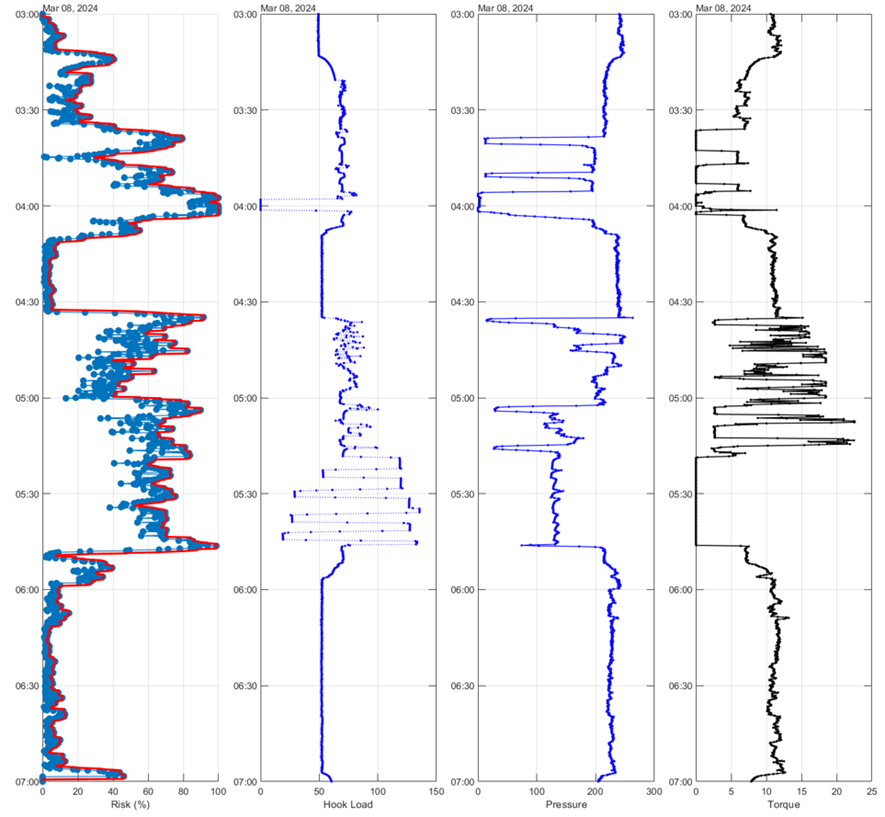
Рисунок 2. Итоговый риск прихвата (крайний слева)
5.5. Анализ инцидентов и расчеты риска
Для проверки работы алгоритма использовались реальные данные, полученные со скважины XXXXXX за период с 07.01.2025 00:00 до 07.01.2025 01:00.
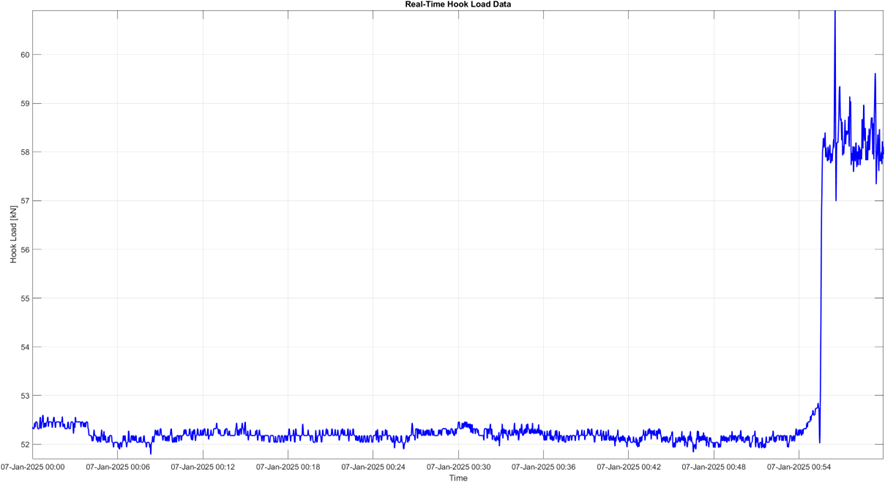
Рисунок 3. График исходных данных (вес на крюке)
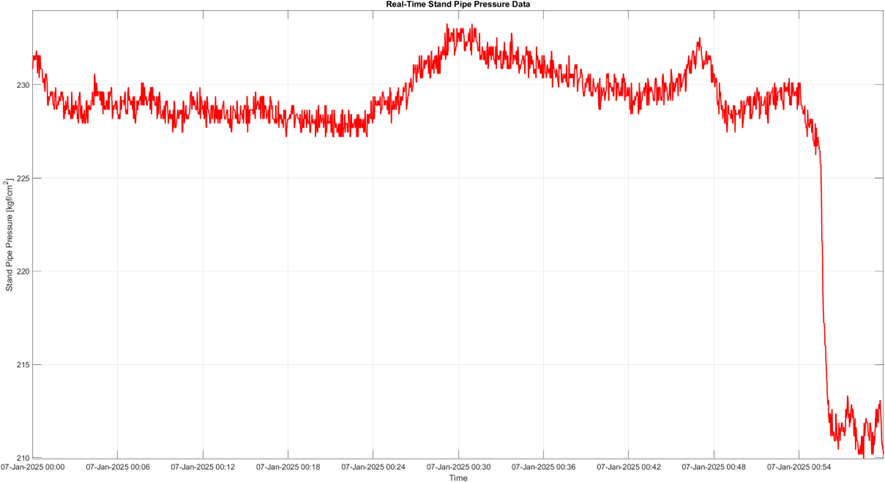
Рисунок 4. График исходных данных (давление)
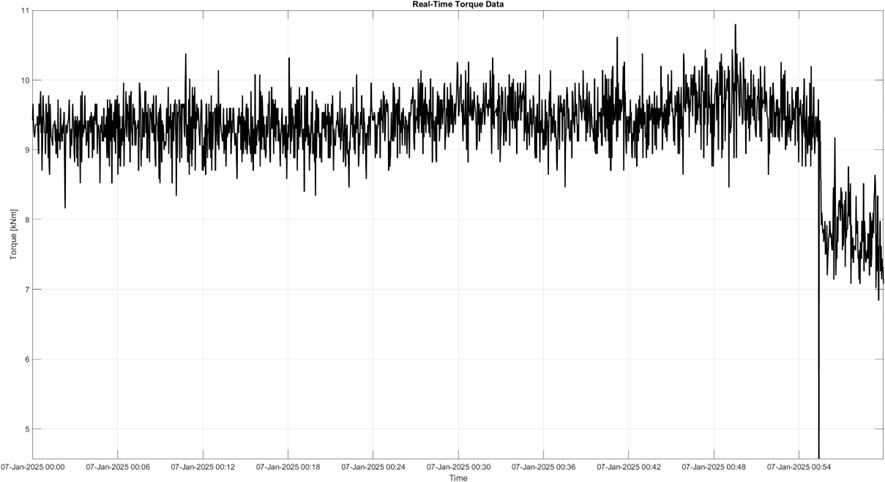
Рисунок 5. График исходных данных (крутящий момент)
Анализ графиков с реальными сырыми данными (Hook Load, Standpipe Pressure, Torque) за выбранный временной интервал для демонстрации исходных параметров до применения алгоритма
На графиках наблюдаются значения параметров, соответствующие бурению по режимно-технологической карте. Отклонений от нормального режима не выявлено. В правой части графиков видно изменение параметров, связанное со сменой технологического этапа. Этот участок будет использован для проверки работы алгоритма на выявление возможных осложнений.

Рисунок 6. График изменение метрики DEV для веса на крюке
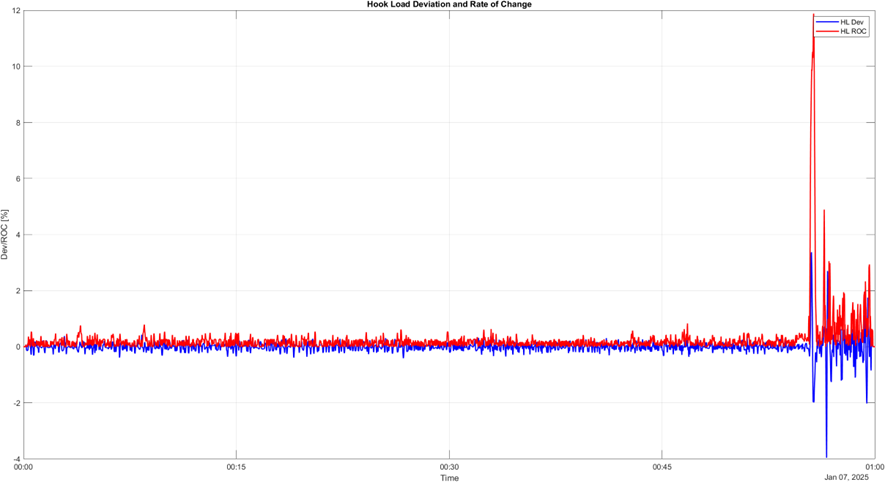
Рисунок 7. График изменения метрики ROC для веса на крюке

Рисунок 8. График изменения метрики DEV для давления
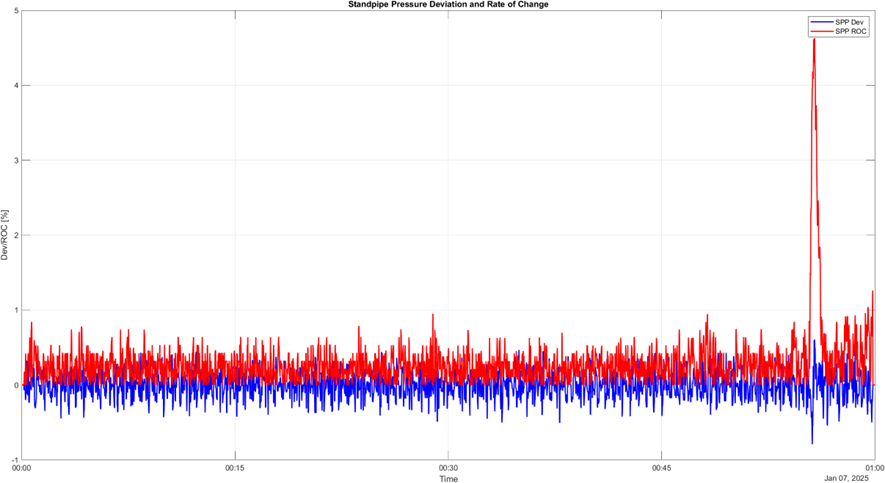
Рисунок 9. График изменения метрики ROC для давления
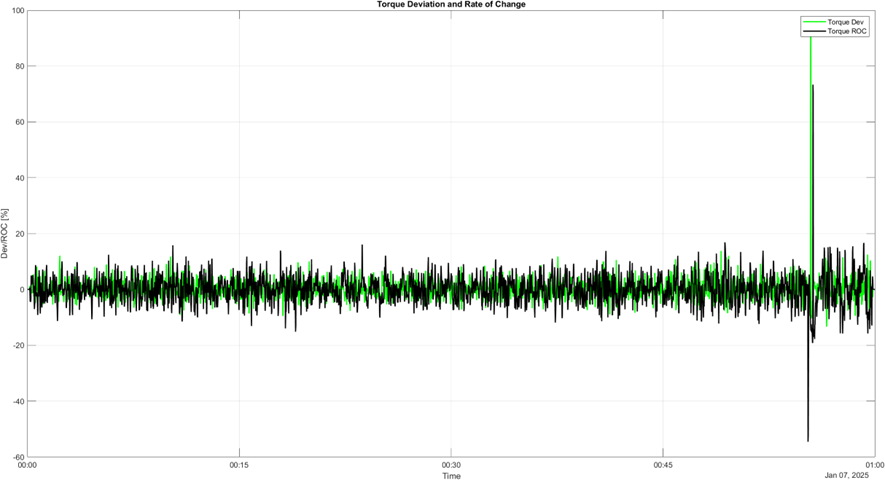
Рисунок 10. График изменения метрики DEV для крутящего момента
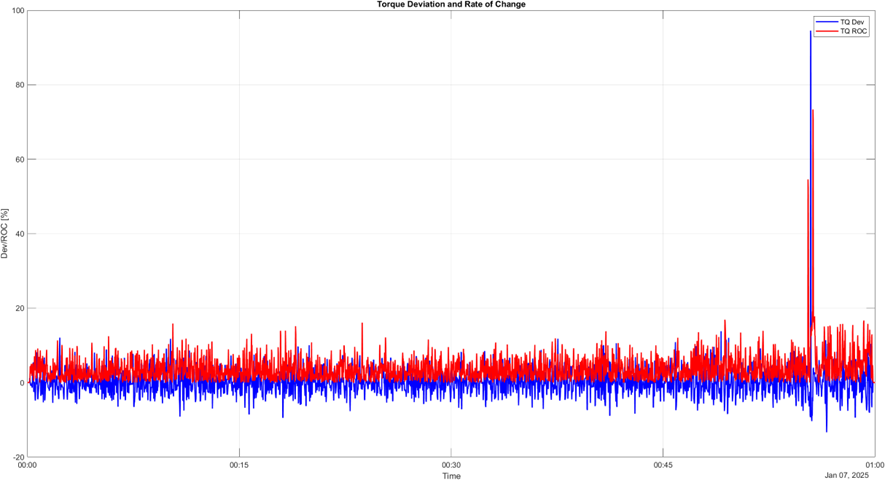
Рисунок 11. График изменения метрики ROC для крутящего момента
На представленных графиках наблюдается ряд пиковых значений, которые коррелируют по трем отслеживаемым параметрам: Hook Load, Standpipe Pressure и Torque. Эти пики указывают на рост осевых и торсионных нагрузок в процессе бурения. Подобное поведение может свидетельствовать о начале проблем со скважиной, таких как увеличение трения или возможное зашламовывание ствола. Дальнейший анализ позволит подтвердить наличие риска прихвата и оценить эффективность применяемого алгоритма для своевременного выявления подобных отклонений.
Уровень оповещений (Alert Level)
На построенных графиках отображается Alert Level для каждого параметра.
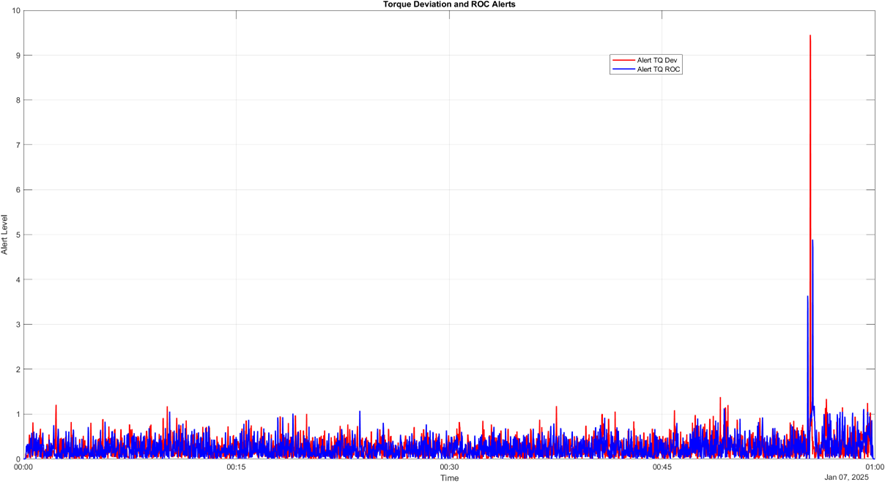
Рисунок 12. Уровень оповещений (крутящий момент)
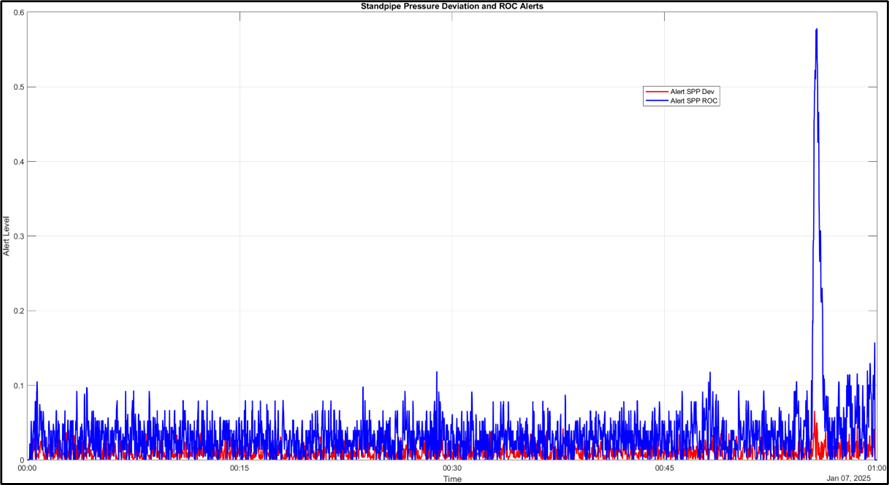
Рисунок 13. Уровень оповещений (давление в нагнетательной линии)
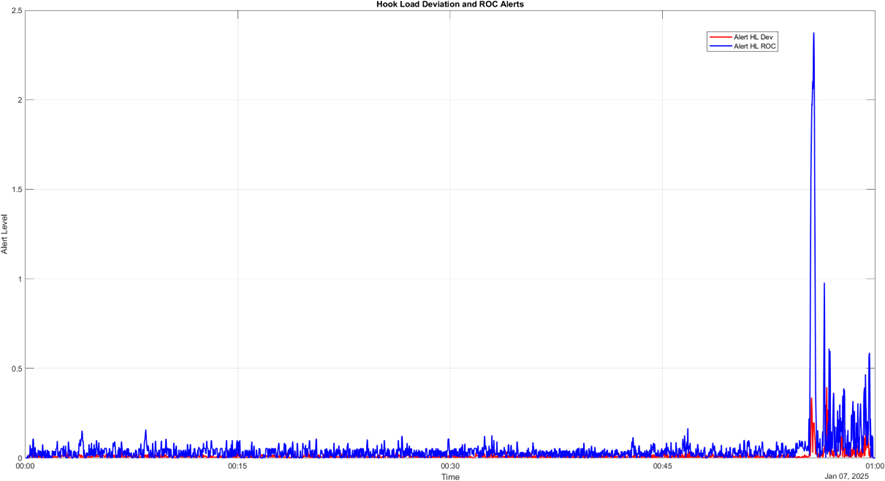
Рисунок 14. Уровень оповещений (вес на крюке)
5.6. Stuck Risk
Для оценки риска прихвата использован анализ Alert Level по параметрам Hook Load, Standpipe Pressure и Torque.
На построенном графике отображен итоговый профиль риска прихвата с временной привязкой. Были выделены три зоны риска:
-
зона нормальных условий — риск менее 35 % (зеленый фон);
-
зона неоптимальных условий — риск от 35 % до 50 % (желтый фон);
-
зона высокого риска — риск более 50 % (красный фон).
На графике можно наблюдать стабильные значения риска на протяжении большей части времени, что соответствует нормальным условиям работы буровой установки. Однако ближе к концу периода фиксируется резкий рост риска, который достигает 34 %, но остается в пределах зоны нормальных условий.
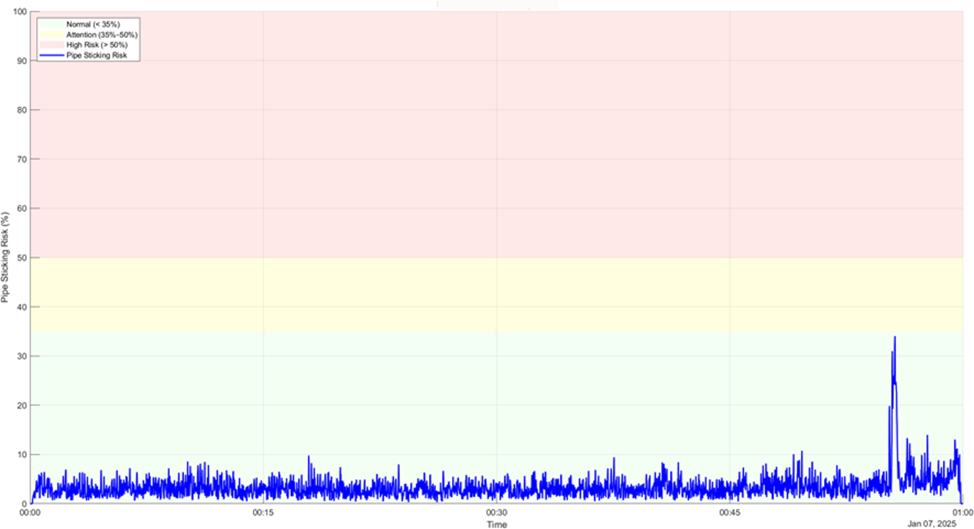
Рисунок 15. График интегрального риска с зонами риска
6. Заключение
Разработанный метод показал, что интеграция физических моделей Torque & Drag и гидравлики с вычисляемыми в реальном времени метриками отклонения (DEV) и скорости изменения (ROC) позволяет формировать надежный и интерпретируемый показатель риска прихвата бурильной колонны. Разработанный алгоритм Stuck Risk обеспечивает сбалансированное соотношение чувствительности к отклонениям и скорости этих отклонений, позволяя минимизировать как ложноположительные, так и ложноотрицательные срабатывания. Дополнение системы модулем второго уровня на основе LSTM-автоэнкодера расширяет ее возможности, обеспечивая выявление сложных многомерных паттернов, не захватываемых традиционными методами.
Ключевым преимуществом предложенного подхода является инженерная интерпретируемость результатов: инженер-технолог получает не только численный индекс риска, но и разложение вклада каждого параметра, что упрощает принятие корректирующих решений в режиме реального времени. Практическая апробация на реальных интервалах продемонстрировала эффективность методики — в ряде случаев своевременные меры позволили избежать серьезных осложнений, а общая точность раннего предупреждения составила около 86 %.
Внедрение описанной методики в системы цифрового супервайзинга способно существенно повысить безопасность и экономическую эффективность буровых операций, снижая риск непроизводственных простоев и финансовых потерь. В долгосрочной перспективе подобные гибридные алгоритмы могут стать основой для создания полноценных интеллектуальных ассистентов оператора, работающих в режиме реального времени и обеспечивающих предиктивное управление процессом бурения.
Благодарности
Авторы выражают искреннюю признательность компании ООО «ТетраСофт» за предоставленную поддержку, консультации и содействие в подготовке исследования. Профессиональный опыт и техническая экспертиза сотрудников компании внесли значимый вклад в качество выполненной работы.
1. Al-Mamoori H. N. Stuck Pipe Detection in Oil and Gas Drilling Operations Using Deep Learning Autoencoder for Anomaly Diagnosis / Al-Mamoori H. N., Tian J., Ma H. // Applied Sciences. — 2025. — No. 15(9).
2. Chandola V. Anomaly detection: A survey / Chandola V., Banerjee A., Kumar V. // ACM Computing Surveys. — 2009. — Vol. 41. — No. 3.
3. Energistics. WITSML Data Standards [Electronic resource]. — URL: https://www.energistics.org/ (accessed: 15.05.2025).
4. Khan S. Deep Learning for Time Series Anomaly Detection: A Survey / Khan S. et al. // arXiv. — 2022. — arXiv:2201.07284.
5. Li H. Intelligent Prediction of Stuck Pipe Using Combined Data-Driven Methods / Li H., Wang J. // Applied Sciences. — 2022. — Vol. 12. — No. 15.
6. Raksagati T. Torque and Drag Equations and Modelling Approaches. — Technical report, 2008.
7. Shakir M. Stuck Pipe Detection in Oil and Gas Drilling Operations Using Deep Learning Autoencoders / Shakir M. et al. // Applied Sciences. — 2023. — Vol. 13. — No. 4.
8. Zhang X. Predictive big data analytics for drilling downhole problems: A review / Zhang X., Li Y. // Journal of Petroleum Science and Engineering. — 2023. — Vol. 220.
9. WELLPLAN/DOX Technical Documentation — Torque & Drag modules // Halliburton / Landmark product literature. — 2023.